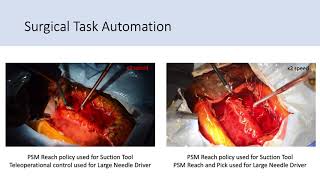
Open-Sourced Reinforcement Learning for Automating Surgical RoboticsWe are excited to announce dVRL, our open-sourced Gym-like environment for training (deep) reinforcement learning for autonomous robotic...
Now You Can Blog from Everywhere!We’ve made it quick and convenient for you to manage your blog from anywhere. In this blog post we’ll share the ways you can post to your...
Design a Stunning BlogWhen it comes to design, the Wix blog has everything you need to create beautiful posts that will grab your reader's attention. Check out...