MRI/CT-guided Robotic Surgery
Perception and state estimation is a primary challenge in minimally invasive surgery (MIS). Real-time intra-operative Computed Tomography (CT) and Magnetic Resonance Imaging (MRI) provide global, actionable information to physicians without requiring line-of-sight to the anatomy. This information enables them to diagnose and operate on medical conditions with full contextual information.
Currently, both of these environments are very difficult to operate within due to their highly restrictive bore and safety constraints (radiation exposure and high magnetic fields for CT and MRI, respectively). In addition to the safety benefits, robotics will enable better patient outcomes by providing a more ergonomic User Interface to physicians.
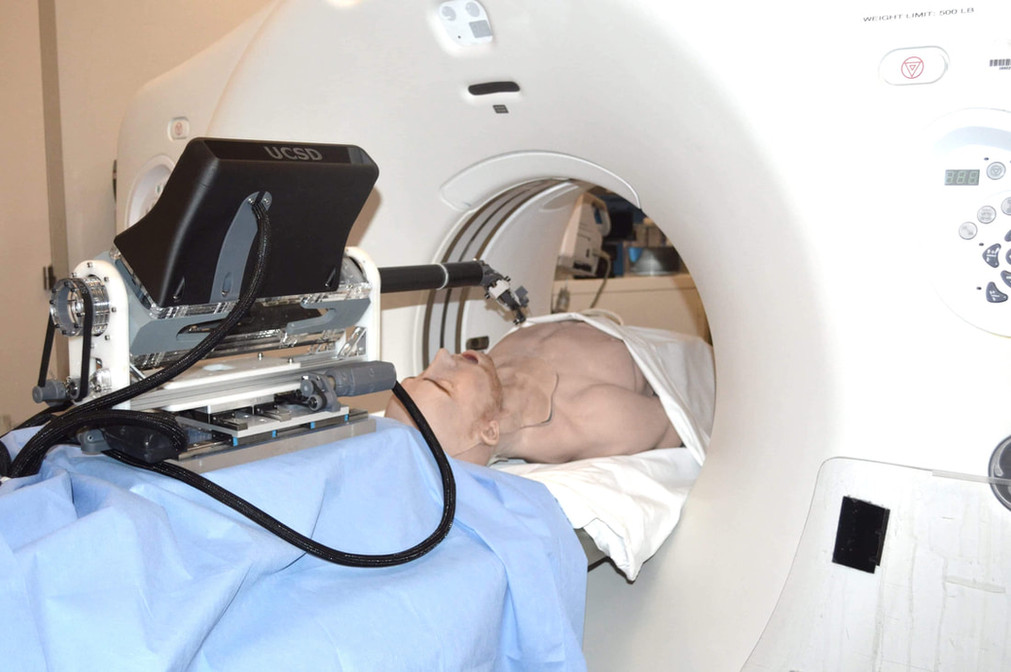
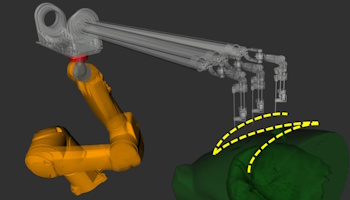
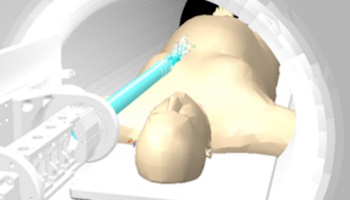
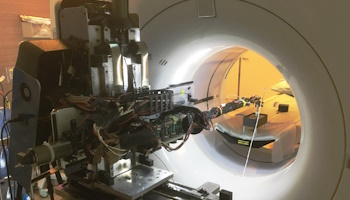
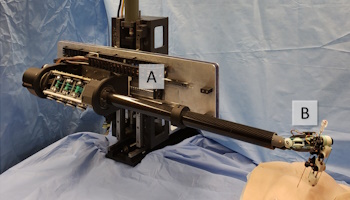
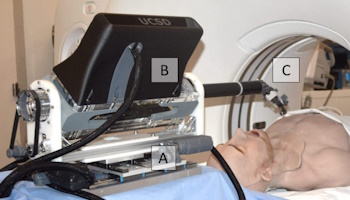
We are developing a robotic platform for CT guided needle lung biopsy. The robot has an exo-bore backend and an intra-bore cable driven end effector for a significant collision free workspace. This platform is open-source and low cost to reproduce. Further development is being pursued to extend this robot to more general MIS applications, including catheter steering and endoscopic surgery.
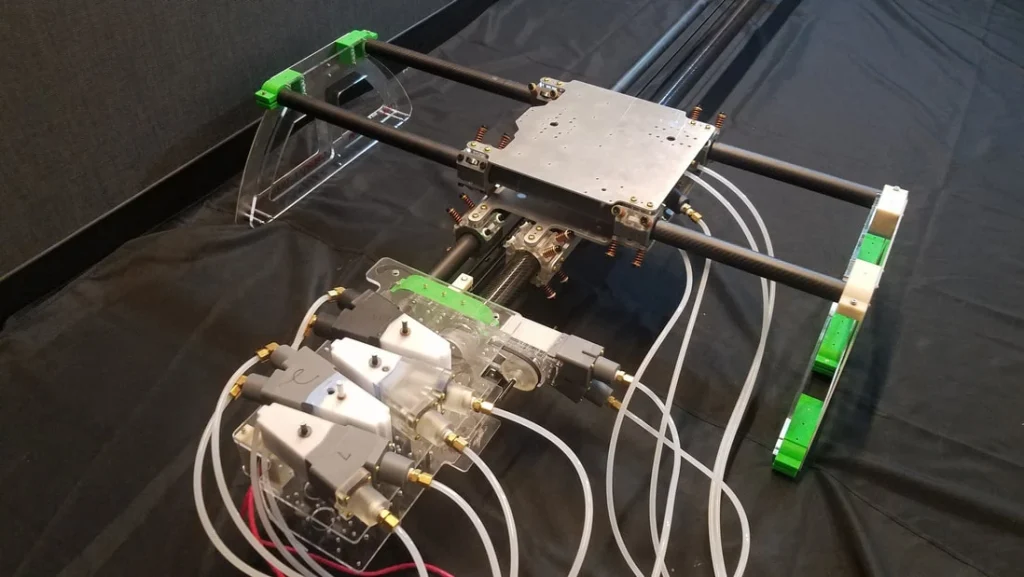
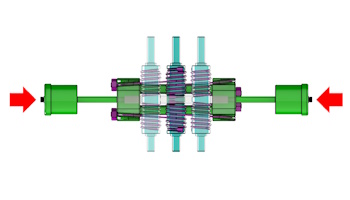
We are additionally developing MRI compatible actuators using a 3D printable rolling diaphragm hydro-static transmission with a novel clutching mechanism. This will enable easy to use MRI compatible "motors" which retain the advantages and ease of control of traditional electric motors.
Students & Collaborators
- Peihan Zhang
- Ishan Duriseti
- Derek Chen
- Advaith Vinodh
- Saee Phalke

Publications
Dexterous Control of an 11-DOF Redundant Robot for CT-Guided Needle Insertion With Task-Oriented Weighted Policies
arXiv preprint arXiv:2503.14753 (2025)
Peihan Zhang, Florian Richter, Ishan Duriseti, Albert Hsiao, Sean Tutton, Alexander Norbash, Michael Yip
CRANE: A Redundant, Multi-Degree-of-Freedom Computed Tomography Robot for Heightened Needle Dexterity within a Medical Imaging Bore
IEEE Transactions on Robotics (2024)
Dimitrious Schreiber, Zhaowei Yu, Taylor Henderson, Derek Chen, Alexander Norbash, Michael C Yip
Design and Mechanics of Cable-Driven Rolling Diaphragm Transmission for High-Transparency Robotic Motion
Proc. IEEE International Conference on Robotics and Automation (ICRA) (2023)
Hoi Man Lam, W Jared Walker, Lucas Jonasch, Dimitri Schreiber, Michael C Yip
CRANE: a 10 degree-of-freedom, tele-surgical system for dexterous manipulation within imaging bores
Proc. IEEE International Conference on Robotics and Automation (ICRA) (2022)
Dimitri Schreiber, Zhaowei Yu, Hanpeng Jiang, Taylor Henderson, Guosong Li, Julie Yu, Renjie Zhu, Alexander M Norbash, Michael C Yip
CRANE: A highly dexterous needle placement robot for evaluation of interventional radiology procedures
C4 Workshop at IEEE/RSJ International Conference on Robotics and Automation (2019)
Dimitri A Schreiber, Hanpeng Jiang, Guosong Li, Julie Yu, Zhaowei Yu, Renjie Zhu, Alexander M Norbash, Michael C Yip BEST PAPER AWARD
An open-source 7-axis, robotic platform to enable dexterous procedures within CT scanners
Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (2019)
Dimitri A Schreiber, Daniel B Shak, Alexander M Norbash, Michael C Yip