Publications
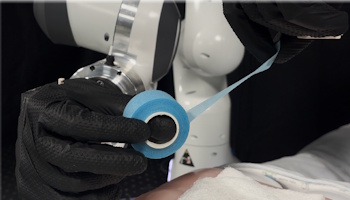
Towards Autonomous Tape Handling for Robotic Wound Redressing
arXiv preprint arXiv:2510.06127 (2025)
Xiao Liang, Lu Shen, Peihan Zhang, Soofiyan Atar, Florian Richter, Michael Yip
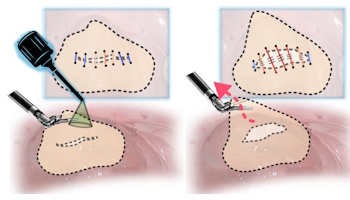
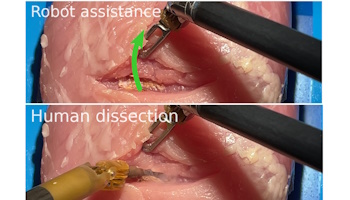
Feedback Matters: Augmenting Autonomous Dissection with Visual and Topological Feedback
arXiv preprint arXiv:2510.04074 (2025)
Chung-Pang Wang, Changwei Chen, Xiao Liang, Soofiyan Atar, Florian Richter, Michael Yip
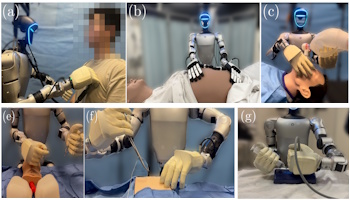
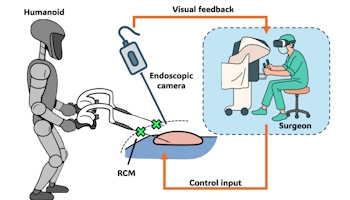
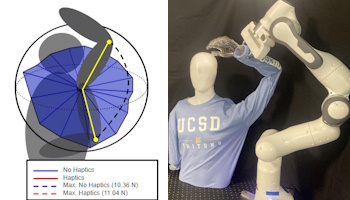
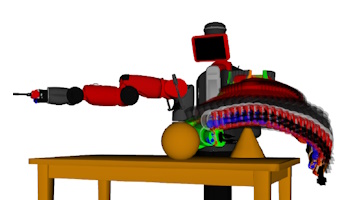
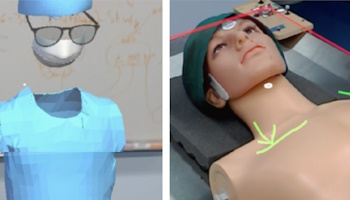
Humanoids in Hospitals: A Technical Study of Humanoid Robot Surrogates for Dexterous Medical Interventions
arXiv preprint arXiv:2503.12725 (2025)
Soofiyan Atar, Xiao Liang, Calvin Joyce, Florian Richter, Wood Ricardo, Charles Goldberg, Preetham Suresh, Michael Yip
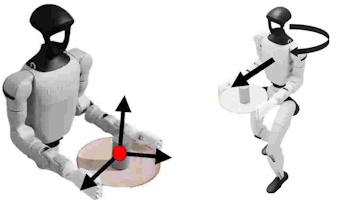
SteadyTray: Learning Object Balancing Tasks in Humanoid Tray Transport via Residual Reinforcement Learning
arXiv preprint arXiv:2603.10306 (2026)
Anlun Huang, Zhenyu Wu, Soofiyan Atar, Yuheng Zhi, Michael Yip
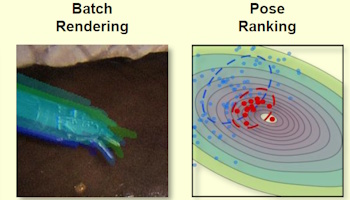
Real-time Rendering-based Surgical Instrument Tracking via Evolutionary Optimization
arXiv preprint arXiv:2603.11404 (2026)
Hanyang Hu, Zekai Liang, Florian Richter, Michael C Yip
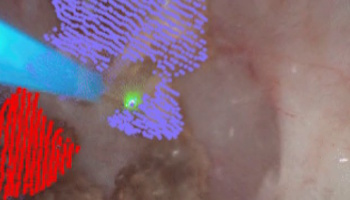
Detection of fragmentation while dusting during retrograde intrarenal laser lithotripsy: a novel computer vision and perception pipeline
Lasers in medical science (2026)
Jonathan E Katz, Orlando Diaz-Ramos, Christopher Yong-Zyn Lo, Jamie Finegan, Tung Yen Chiang, Yijie He, Zekai Liang, Michael Yip, Roger L Sur, Shan Lin
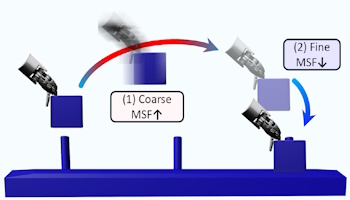
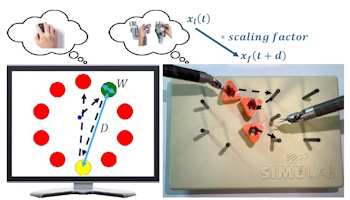
SIMS: Surgeon-Intention-driven Motion Scaling for Efficient and Precise Teleoperation
arXiv preprint arXiv:2503.01216 (2025)
Jeonghyeon Yoon, Sanghyeok Park, Hyojae Park, Cholin Kim, Michael C Yip, Minho Hwang

Learning to Nudge: A Scalable Barrier Function Framework for Safe Robot Interaction in Dense Clutter
arXiv preprint arXiv:2601.02686 (2026)
Haixin Jin, Nikhil Uday Shinde, Soofiyan Atar, Hongzhan Yu, Dylan Hirsch, Sicun Gao, Michael C Yip, Sylvia Herbert
LapSurgie: humanoid robots performing surgery via teleoperated handheld laparoscopy
arXiv preprint arXiv:2510.03529 (2025)
Zekai Liang, Xiao Liang, Soofiyan Atar, Sreyan Das, Zoe Chiu, Peihan Zhang, Calvin Joyce, Florian Richter, Shanglei Liu, Michael C Yip

ARCSnake V2: An Amphibious Multi-Domain Screw-Propelled Snake-Like Robot
arXiv preprint arXiv:2511.11970 (2025)
Sara Wickenhiser, Lizzie Peiros, Calvin Joyce, Peter Gavrilrov, Sujaan Mukherjee, Syler Sylvester, Junrong Zhou, Mandy Cheung, Jason Lim, Florian Richter
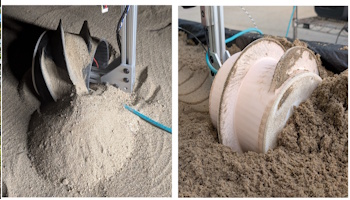
Characterization and Evaluation of Screw-Based Locomotion Across Aquatic, Granular, and Transitional Media
arXiv preprint arXiv:2511.11958 (2025)
Derek Chen, Zoe Samuels, Lizzie Peiros, Sujaan Mukherjee, Michael C Yip

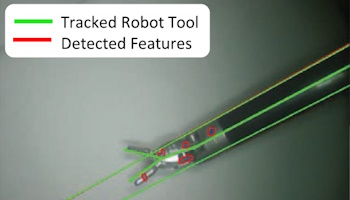
Efficient Surgical Robotic Instrument Pose Reconstruction in Real World Conditions Using Unified Feature Detection
arXiv preprint arXiv:2510.03532 (2025)
Zekai Liang, Kazuya Miyata, Xiao Liang, Florian Richter, Michael C Yip

In-Hand Manipulation of Articulated Tools with Dexterous Robot Hands with Sim-to-Real Transfer
arXiv preprint arXiv:2509.23075 (2025)
Soofiyan Atar, Daniel Huang, Florian Richter, Michael Yip
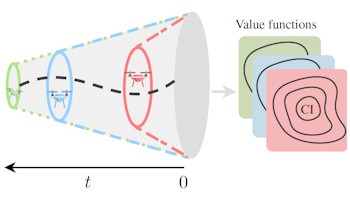
From space to time: Enabling adaptive safety with learned value functions via disturbance recasting
arXiv preprint arXiv:2509.19597 (2025)
Sander Tonkens, Nikhil Uday Shinde, Azra Begzadić, Michael C Yip, Jorge Cortés, Sylvia L Herbert

3D Rendering of Cystoscopy Video Footage: A Novel Method Utilizing Neural Radiance Field Processing
Cureus (2025)
Jonathan E Katz, Jamie Finegan, Pablo F Beutelspacher, Jingpei Lu, Shan Lin, Michael Yip, Roger L Sur, Jamie L Finegan, Roger Sur
The robot will see you now: Foundation models are the path forward for autonomous robotic surgery
Science Robotics (2025)
Michael Yip
Stable Tracking-in-the-Loop Control of Cable-Driven Surgical Manipulators under Erroneous Kinematic Chains
arXiv preprint arXiv:2507.05663 (2025)
Neelay Joglekar, Fei Liu, Florian Richter, Michael C Yip
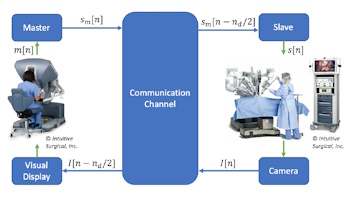
Optimal Motion Scaling for Delayed Telesurgery
2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (2025)
Jason Lim, Florian Richter, Zih-Yun Chiu, Jaeyon Lee, Ethan Quist, Nathan Fisher, Jonathan Chambers, Steven Hong, Michael C Yip
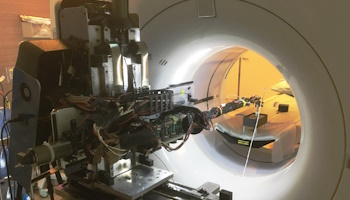
Dexterous Control of an 11-DOF Redundant Robot for CT-Guided Needle Insertion With Task-Oriented Weighted Policies
arXiv preprint arXiv:2503.14753 (2025)
Peihan Zhang, Florian Richter, Ishan Duriseti, Albert Hsiao, Sean Tutton, Alexander Norbash, Michael Yip
Differentiable Rendering-based Pose Estimation for Surgical Robotic Instruments
Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (2025)
Zekai Liang, Zih-Yun Chiu, Florian Richter, Michael C Yip
Back to Base: Towards Hands-Off Learning via Safe Resets with Reach-Avoid Safety Filters
Learning for Decision and Control Conference (L4DC) (2025)
Azra Begzadić, Nikhil Uday Shinde, Sander Tonkens, Dylan Hirsch, Kaleb Ugalde, Michael C Yip, Jorge Cortés, Sylvia Herbert
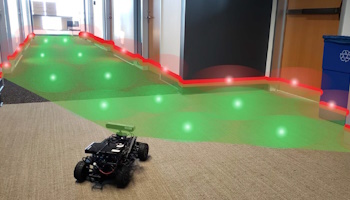
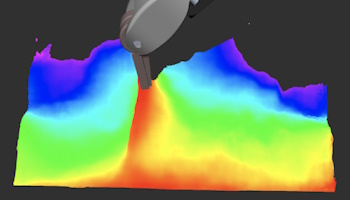
KineDepth: Utilizing Robot Kinematics for Online Metric Depth Estimation
Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (2025)
Soofiyan Atar, Yuheng Zhi, Florian Richter, Michael Yip
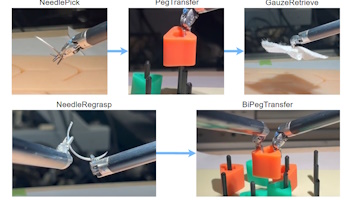
SurgIRL: Towards Life-Long Learning for Surgical Automation by Incremental Reinforcement Learning
IEEE Robotics and Automation Letters (2025)
Yun-Jie Ho, Zih-Yun Chiu, Yuheng Zhi, Michael C Yip

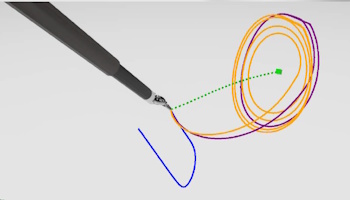
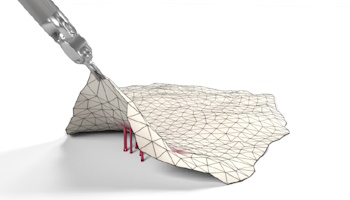
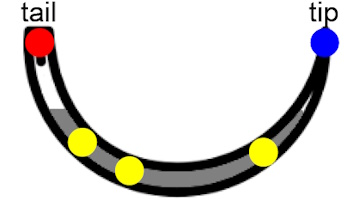
AutoPeel: Adhesion-aware Safe Peeling Trajectory Optimization for Robotic Wound Care
Proc. IEEE International Conference on Robotics and Automation (ICRA) (2025)
Xiao Liang, Youcheng Zhang, Fei Liu, Florian Richter, Michael Yip BEST PAPER AWARD NOMINATION
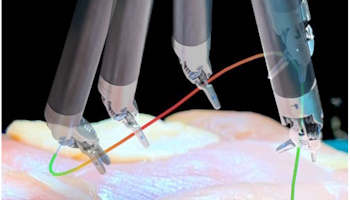
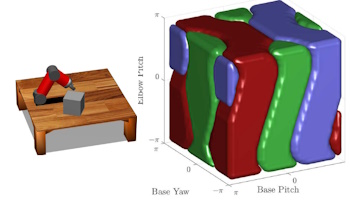
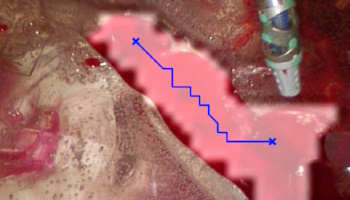
MEDiC: Autonomous Surgical Robotic Assistance to Maximizing Exposure for Dissection and Cautery
Proc. IEEE International Conference on Robotics and Automation (ICRA) (2025)
Xiao Liang, Chung-Pang Wang, Nikhil Uday Shinde, Fei Liu, Florian Richter, Michael Yip
Haptic Shoulder for Rendering Biomechanically Accurate Joint Limits for Human-Robot Physical Interactions
Proc. IEEE International Conference on Robotics and Automation (ICRA) (2025)
Elizabeth Peiros, Calvin Joyce, Tarun Murugesan, Roger Nguyen, Isabella Fiorini, Rizzi Galibut, Michael C Yip
CtRNet-X: Camera-to-Robot Pose Estimation in Real-world Conditions Using a Single Camera
Proc. IEEE International Conference on Robotics and Automation (ICRA) (2025)
Jingpei Lu, Zekai Liang, Tristin Xie, Florian Ritcher, Shan Lin, Sainan Liu, Michael C Yip
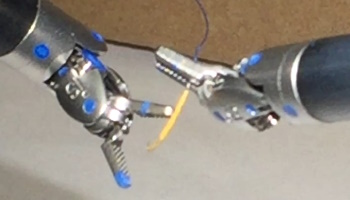
Autonomous Image-to-Grasp Robotic Suturing Using Reliability-Driven Suture Thread Reconstruction
IEEE Robotics and Automation Letters (2025)
Neelay Joglekar, Fei Liu, Florian Richter, Michael C Yip
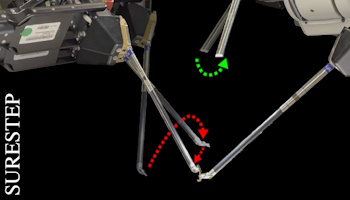
SURESTEP: An Uncertainty-Aware Trajectory Optimization Framework to Enhance Visual Tool Tracking for Robust Surgical Automation
Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (2024)
Nikhil U Shinde, Zih-Yun Chiu, Florian Richter, Jason Lim, Yuheng Zhi, Sylvia Herbert, Michael C Yip
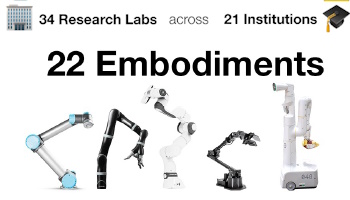
Open x-embodiment: Robotic learning datasets and rt-x models
Proc. IEEE International Conference on Robotics and Automation (ICRA) (2024)
Open X-Embodiment Collaboration BEST PAPER AWARD
JIGGLE: An Active Sensing Framework for Boundary Parameters Estimation in Deformable Surgical Environments
Robotics: Science and Systems (2024)
Nikhil Uday Shinde, Xiao Liang, Fei Liu, Yutong Zhang, Florian Richter, Sylvia Herbert, Michael C Yip
Flexible attention-based multi-policy fusion for efficient deep reinforcement learning
Proc. Advances in Neural Information Processing Systems (NeurIPS) (2024)
Zih-Yun Chiu, Yi-Lin Tuan, William Yang Wang, Michael Yip
DROID: A large-scale in-the-wild robot manipulation dataset
Robotics: Science and Systems (2024)
Alexander Khazatsky, Karl Pertsch, Suraj Nair, Ashwin Balakrishna, Sudeep Dasari, Siddharth Karamcheti, Soroush Nasiriany, Mohan Kumar Srirama, Lawrence Yunliang Chen, Kirsty Ellis, Peter David Fagan, Joey Hejna, Masha Itkina, Marion Lepert, ...

HemoSet: The First Blood Segmentation Dataset for Automation of Hemostasis Management
Proc. IEEE International Symposium on Medical Robotics (ISMR) (2024)
Albert J Miao, Shan Lin, Jingpei Lu, Florian Richter, Benjamin Ostrander, Emily K Funk, Ryan K Orosco, Michael C Yip

Bridging Real-to-Sim Gaps through Online Stiffness Optimization with Perception-Enabled Residual Mapping
Proc. Workshop on Integrated Perception, Planning, and Control for Physically and Contextually-Aware Robot Autonomy, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (2024)
Xiao Liang, Fei Liu, Yutong Zhang, Michael Yip

Zero-Shot Constrained Motion Planning Transformers Using Learned Sampling Dictionaries
Proc. IEEE Conference on Robotics and Automation (ICRA) (2024)
Jacob J Johnson, Ahmed H Qureshi, Michael C Yip
Tracking Snake-like Robots in the Wild Using Only a Single Camera
Proc. IEEE Conference on Robotics and Automation (ICRA) (2024)
Jingpei Lu, Florian Richter, Shan Lin, Michael C Yip

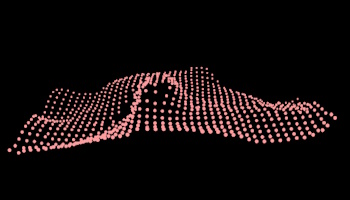
SuPerPM: A Large Deformation-Robust Surgical Perception Framework Based on Deep Point Matching Learned from Physical Constrained Simulation Data
Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (2024)
Shan Lin, Albert J Miao, Ali Alabiad, Fei Liu, Kaiyuan Wang, Jingpei Lu, Florian Richter, Michael C Yip
Real-to-Sim Deformable Object Manipulation: Optimizing Physics Models with Residual Mappings for Robotic Surgery
Proc. IEEE International Conference on Robotics and Automation (ICRA) (2024)
Xiao Liang, Fei Liu, Yutong Zhang, Yuelei Li, Shan Lin, Michael Yip
AnyOKP: One-Shot and Instance-Aware Object Keypoint Extraction with Pretrained ViT
Proc. IEEE Conference on Robotics and Automation (ICRA) (2024)
Fangbo Qin, Taogang Hou, Shan Lin, Kaiyuan Wang, Michael C Yip, Shan Yu

Achieving Autonomous Cloth Manipulation with Optimal Control via Differentiable Physics-Aware Regularization and Safety Constraints
Proc. IEEE Conference on Robotics and Automation (ICRA) (2024)
Yutong Zhang, Fei Liu, Xiao Liang, Michael Yip
Tracking and mapping in medical computer vision: A review
Medical Image Analysis (2024)
Adam Schmidt, Omid Mohareri, Simon DiMaio, Michael C Yip, Septimiu E Salcudean
Towards Non-Parametric Models for Confidence Aware Image Prediction from Low Data using Gaussian Processes
Proc. IEEE International Conference on Automation Science and Engineering (CASE) (2024)
Nikhil U Shinde, Florian Richter, Michael C Yip
The current state of autonomous suturing: a systematic review
Surgical Endoscopy (2024)
Benjamin T Ostrander, Daniel Massillon, Leo Meller, Zih-Yun Chiu, Michael Yip, Ryan K Orosco
Surgical perception framework for robotic tissue manipulation
US Patent App. 18/273,819 (2024)
Florian Richter, Michael Yip, Yang Li
Multi-catheter flexible robotic system
US Patent 12,011,246 (2024)
Aaron Gunn, Philip Weissbrod, Michael Yip
BAA-NGP: Bundle-adjusting accelerated neural graphics primitives
Proc. IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) (2024)
Sainan Liu, Shan Lin, Jingpei Lu, Alexey Supikov, Michael Yip
Robust Surgical Tool Tracking with Pixel-based Probabilities for Projected Geometric Primitives
Proc. IEEE International Conference on Robotics and Automation (ICRA) (2024)
Christopher D'Ambrosia, Florian Richter, Zih-Yun Chiu, Nikhil Shinde, Fei Liu, Henrik I Christensen, Michael C Yip
CRANE: A Redundant, Multi-Degree-of-Freedom Computed Tomography Robot for Heightened Needle Dexterity within a Medical Imaging Bore
IEEE Transactions on Robotics (2024)
Dimitrious Schreiber, Zhaowei Yu, Taylor Henderson, Derek Chen, Alexander Norbash, Michael C Yip
Real-to-simulation matching of deformable soft tissue and other objects with position-based dynamics for robot control
US Patent App. 18/281,472 (2024)
Fei Liu, Michael C Yip, Florian Richter
Rendering of Cystoscopy Video Footage: A Novel Method Utilizing Neural Radiance Field Processing
The Journal of Urology (2024)
Jonathan E Katz, Jamie Finnegan, Jingpei Lu, Shan Lin, Michael Yip, Roger Sur

Open Robotic Thyroidectomy in a Porcine Model as a Tool for Translating Novel Robotic Technologies
KeAi: Laparoscopic, Endoscopic & Robotic Surgery (2023)
Emily Funk, Benjamin T Ostrander, Won Seo Park, Florian Richter, Michael Yip, Philip A Weissbrod, Ryan K Orosco
Suture thread spline reconstruction from endoscopic images for robotic surgery with reliability-driven keypoint detection
Proc. IEEE International Conference on Robotics and Automation (ICRA) (2023)
Neelay Joglekar, Fei Liu, Ryan Orosco, Michael Yip
SemHint-MD: Learning from Noisy Semantic Labels for Self-Supervised Monocular Depth Estimation
arXiv preprint arXiv:2303.18219 (2023)
Shan Lin, Yuheng Zhi, Michael C Yip
Robotic manipulation of deformable rope-like objects using differentiable compliant position-based dynamics
IEEE Robotics and Automation Letters (2023)
Fei Liu, Entong Su, Jingpei Lu, Mingen Li, Michael C Yip
Real-time constrained 6d object-pose tracking of an in-hand suture needle for minimally invasive robotic surgery
Proc. IEEE International Conference on Robotics and Automation (ICRA) (2023)
Zih-Yun Chiu, Florian Richter, Michael C Yip BEST PAPER AWARD
ORRN: An ODE-based recursive registration network for deformable respiratory motion estimation with lung 4DCT images
IEEE Transactions on Biomedical Engineering (2023)
Xiao Liang, Shan Lin, Fei Liu, Dimitri Schreiber, Michael Yip
Object-Centric Representations for Interactive Online Learning with Non-Parametric Methods
Proc. IEEE International Conference on Automation Science and Engineering (CASE) (2023)
Nikhil U Shinde, Jacob Johnson, Sylvia Herbert, Michael C Yip
NASU--Novel Actuating Screw Unit: Origami-inspired Screw-based Propulsion on Mobile Ground Robots
Proc. International Symposium on Robotics Research (ISRR) (2024)
Calvin Joyce, Jason Lim, Roger Nguyen, Michael Owens, Sara Wickenhiser, Elizabeth Peiros, Florian Richter, Michael C Yip

Mobility Analysis of Screw-Based Locomotion and Propulsion in Various Media
Proc. IEEE International Conference on Robotics and Automation (ICRA) (2023)
Jason Lim, Calvin Joyce, Elizabeth Peiros, Mingwei Yeoh, Peter V Gavrilov, Sara G Wickenhiser, Dimitri A Schreiber, Florian Richter, Michael C Yip
Markerless camera-to-robot pose estimation via self-supervised sim-to-real transfer
Proc. IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) (2023)
Jingpei Lu, Florian Richter, Michael C Yip
Learning sampling dictionaries for efficient and generalizable robot motion planning with transformers
IEEE Robotics and Automation Letters (2023)
Jacob J Johnson, Ahmed H Qureshi, Michael C Yip
Image-based pose estimation and shape reconstruction for robot manipulators and soft, continuum robots via differentiable rendering
Proc. IEEE International Conference on Robotics and Automation (ICRA) (2023)
Jingpei Lu, Fei Liu, Cedric Girerd, Michael C Yip

Finding biomechanically safe trajectories for robot manipulation of the human body in a search and rescue scenario
Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (2023)
Elizabeth Peiros, Zih-Yun Chiu, Yuheng Zhi, Nikhil Shinde, Michael C Yip
Collaborative mixed-reality system for immersive surgical telementoring
US Patent 12,482,192 (2025)
Nadir Weibel, Michael Yip, Danilo Gasques Rodrigues, Thomas Sharkey, Janet Johnson, Konrad Davis
Design and Mechanics of Cable-Driven Rolling Diaphragm Transmission for High-Transparency Robotic Motion
Proc. IEEE International Conference on Robotics and Automation (ICRA) (2023)
Hoi Man Lam, W Jared Walker, Lucas Jonasch, Dimitri Schreiber, Michael C Yip
Contactless Weight Estimation of Human Body and Body Parts for Safe Robotics-Assisted Casualty Extraction
Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (2023)
Jaeyeon Lee, Ethan Quist, Jonathan Chambers, Michael Yip, Nathan Fisher
BASED: Bundle-adjusting surgical endoscopic dynamic video reconstruction using neural radiance fields
IEEE/CVF Winter Conference on Applications of Computer Vision (WACV) (2025)
Shreya Saha, Sainan Liu, Shan Lin, Jingpei Lu, Michael Yip
System and method for robust and low-cost multi-axis force sensor
US Patent 11,504,194 (2022)
Michael Yip, Jun Zhang, Alex Tran, Winnie Kuang
Surgical robotic platform for operating within the constrained space of an imaging scanner
US Patent 12,478,441 (2025)
Dimitrious A Schreiber, Michael Yip
Artificial intelligence meets medical robotics
Science (2023)
Michael Yip, Septimiu Salcudean, Ken Goldberg, Kaspar Althoefer, Arianna Menciassi, Justin D Opfermann, Axel Krieger, Krithika Swaminathan, Conor J Walsh, He Huang, I-Chieh Lee

Semantic-SuPer: A Semantic-aware Surgical Perception Framework for Endoscopic Tissue Identification, Reconstruction, and Tracking
Proc. IEEE International Conference on Robotics and Automation (ICRA) (2022)
Shan Lin, Albert J Miao, Jingpei Lu, Shunkai Yu, Zih-Yun Chiu, Florian Richter, Michael C Yip
Remote telesurgery in humans: a systematic review
Surgical Endoscopy (2022)
Patrick Barba, Joshua Stramiello, Emily K Funk, Florian Richter, Michael C Yip, Ryan K Orosco
Pose estimation for robot manipulators via keypoint optimization and sim-to-real transfer
IEEE Robotics and Automation Letters (2022)
Jingpei Lu, Florian Richter, Michael C Yip

Porcine Model for Open Robotic Thyroidectomy
Journal of Robotic Surgery (2022)
Emily Funk, Won Seo Park, Florian Richter, Benjamin T Ostrander, Michael Yip, Philip A Weissbrod, Ryan K Orosco
Parameter identification and motion control for articulated rigid body robots using differentiable position-based dynamics
arXiv preprint arXiv:2201.05753 (2022)
Fei Liu, Mingen Li, Jingpei Lu, Entong Su, Michael C Yip

Mixed reality surgical mentoring of combat casualty care related procedures in a perfused cadaver model: Initial results of a randomized feasibility study
Surgery (2022)
Matthew D Tadlock, Erik J Olson, Danilo Gasques, Roland Champagne, Michael J Krzyzaniak, Shawn A Belverud, Vijay Ravindra, Jakob Kerns, Pamela M Choi, Jennifer Deveraux, Janet Johnson, Thomas Sharkey, Michael Yip, Nadir Weibel, Konrad Davis
Markerless suture needle 6d pose tracking with robust uncertainty estimation for autonomous minimally invasive robotic surgery
Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (2022)
Zih-Yun Chiu, Albert Z Liao, Florian Richter, Bjorn Johnson, Michael C Yip

Image based reconstruction of liquids from 2d surface detections
Proc. IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) (2022)
Florian Richter, Ryan K Orosco, Michael C Yip
Diffco: Autodifferentiable proxy collision detection with multiclass labels for safety-aware trajectory optimization
IEEE Transactions on Robotics (2022)
Yuheng Zhi, Nikhil Das, Michael Yip
CRANE: a 10 degree-of-freedom, tele-surgical system for dexterous manipulation within imaging bores
Proc. IEEE International Conference on Robotics and Automation (ICRA) (2022)
Dimitri Schreiber, Zhaowei Yu, Hanpeng Jiang, Taylor Henderson, Guosong Li, Julie Yu, Renjie Zhu, Alexander M Norbash, Michael C Yip
Cable driven hydraulic rolling diaphragm transmission and servo-system
US Patent 11,391,303 (2022)
Michael Yip, Dimitri Schreiber, Alex Grant
Configuration space decomposition for scalable proxy collision checking in robot planning and control
IEEE Robotics and Automation Letters (2022)
Mrinal Verghese, Nikhil Das, Yuheng Zhi, Michael Yip
Biomedical image analysis competitions: The state of current participation practice
arXiv preprint arXiv:2212.08568 (2022)
Matthias Eisenmann, Annika Reinke, Vivienn Weru, Minu Dietlinde Tizabi, Fabian Isensee, Tim J Adler, Patrick Godau, Veronika Cheplygina, Michal Kozubek, Sharib Ali, Anubha Gupta, Jan Kybic, Alison Noble, Carlos Ortiz de Solórzano, Samiksha ...
Autonomous navigation in unknown environments with sparse bayesian kernel-based occupancy mapping
IEEE Transactions on Robotics (2022)
Thai Duong, Michael Yip, Nikolay Atanasov
Super deep: A surgical perception framework for robotic tissue manipulation using deep learning for feature extraction
Proc. IEEE International Conference on Robotics and Automation (ICRA) (2021)
Jingpei Lu, Ambareesh Jayakumari, Florian Richter, Yang Li, Michael C Yip
Robotic tool tracking under partially visible kinematic chain: A unified approach
IEEE Transactions on Robotics (2021)
Florian Richter, Jingpei Lu, Ryan K Orosco, Michael C Yip
Real-to-sim registration of deformable soft tissue with position-based dynamics for surgical robot autonomy
Proc. IEEE International Conference on Robotics and Automation (ICRA) (2021)
Fei Liu, Zihan Li, Yunhai Han, Jingpei Lu, Florian Richter, Michael C Yip
Optimal multi-manipulator arm placement for maximal dexterity during robotics surgery
Proc. IEEE International Conference on Robotics and Automation (ICRA) (2021)
Mingwei Xu, James Di, Nikhil Das, Michael C Yip

NeRP: Neural rearrangement planning for unknown objects
Robotics: Science and Systems (RSS) (2021)
Ahmed H Qureshi, Arsalan Mousavian, Chris Paxton, Michael C Yip, Dieter Fox
Hypertonicity measuring device and method
US Patent App. 17/472,734 (2021)
Harinath Garudadri, Andrew Skalsky, Tse Nga Ng, Michael Yip, Leanne Chukoskie
MPC-MPNet: Model-predictive motion planning networks for fast, near-optimal planning under kinodynamic constraints
IEEE Robotics and Automation Letters (2021)
Linjun Li, Yinglong Miao, Ahmed H Qureshi, Michael C Yip
Motion planning transformers: One model to plan them all
Open Review (2021)
Jacob John Johnson, Linjun Li, Ahmed Qureshi, Michael C Yip
Motion planning transformers: A motion planning framework for mobile robots
arXiv preprint arXiv:2106.02791 (2021)
Jacob J Johnson, Uday S Kalra, Ankit Bhatia, Linjun Li, Ahmed H Qureshi, Michael C Yip
Model-predictive control of blood suction for surgical hemostasis using differentiable fluid simulations
Proc. IEEE International Conference on Robotics and Automation (ICRA) (2021)
Jingbin Huang, Fei Liu, Florian Richter, Michael C Yip BEST PAPER AWARD NOMINEE
Handheld flexible robotic catheter for endoscopic instrumentation
US Patent App. 17/307,649 (2021)
Michael Yip, Phil Weissbrod

From bench to bedside: The first live robotic surgery on the dVRK to enable remote telesurgery with motion scaling
Proc. IEEE International Symposium on Medical Robotics (ISMR) (2021)
Florian Richter, Emily K Funk, Won Seo Park, Ryan K Orosco, Michael C Yip
Exobiology Extant Life Surveyor (EELS)
Pasadena, CA: Jet Propulsion Laboratory, National Aeronautics and Space Administration (2021)
Hamid Marvi, Michael Yip, Brian Wilcox, Ara Kourchians, Rohan Thakker, Nikola Georgiev, Jay Jasper, Sarah Hovsepian, Karl Mitchell, Morgan Cable, Darwin Mick Justin Martia, Andrew Thoes ...
Data-driven actuator selection for artificial muscle-powered robots
Proc. IEEE International Conference on Robotics and Automation (ICRA) (2021)
Taylor West Henderson, Yuheng Zhi, Angela Liu, Michael C Yip
Constrained motion planning networks x
IEEE Transactions on Robotics (2021)
Ahmed Hussain Qureshi, Jiangeng Dong, Asfiya Baig, Michael C Yip
Compensatory motion scaling for time-delayed robotic surgery
Surgical Endoscopy (2021)
Ryan K Orosco, Benjamin Lurie, Tokio Matsuzaki, Emily K Funk, Vasu Divi, F Christopher Holsinger, Steven Hong, Florian Richter, Nikhil Das, Michael Yip
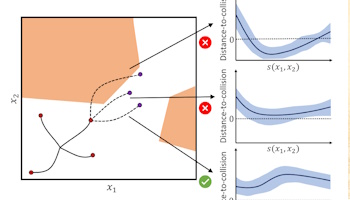
Chance-constrained motion planning using modeled distance-to-collision functions
Proc. IEEE International Conference on Automation Science and Engineering (CASE) (2021)
Jacob J Johnson, Michael C Yip
Bimanual regrasping for suture needles using reinforcement learning for rapid motion planning
Proc. IEEE International Conference on Robotics and Automation (ICRA) (2021)
Zih-Yun Chiu, Florian Richter, Emily K Funk, Ryan K Orosco, Michael C Yip
Autonomous robotic suction to clear the surgical field for hemostasis using image-based blood flow detection
IEEE Robotics and Automation Letters (2021)
Florian Richter, Shihao Shen, Fei Liu, Jingbin Huang, Emily K Funk, Ryan K Orosco, Michael C Yip

Artifacts mitigation in sensors for spasticity assessment
Advanced Intelligent Systems (2021)
Cagri Yalcin, Mathew Sam, Yifeng Bu, Moran Amit, Andrew J Skalsky, Michael Yip, Tse Nga Ng, Harinath Garudadri
Artemis: A collaborative mixed-reality system for immersive surgical telementoring
Proc. Conference on Human Factors in Computing Systems (CHI) (2021)
Danilo Gasques, Janet G Johnson, Tommy Sharkey, Yuanyuan Feng, Ru Wang, Zhuoqun Robin Xu, Enrique Zavala, Yifei Zhang, Wanze Xie, Xinming Zhang, Konrad Davis, Michael Yip, Nadir Weibel

Arcsnake: Reconfigurable snakelike robot with archimedean screw propulsion for multidomain mobility
IEEE Transactions on Robotics (2021)
Florian Richter, Peter V Gavrilov, Hoi Man Lam, Amir Degani, Michael C Yip
Vibration-based multi-axis force sensing: Design, characterization, and modeling
IEEE Robotics and Automation Letters (2020)
Winnie Kuang, Michael Yip, Jun Zhang

SuPer: A Surgical Perception Framework for Endoscopic Tissue Manipulation with Surgical Robotics
IEEE Robotics and Automation Letters (2020)
Yang Li, Florian Richter, Jingpei Lu, Emily Funk, Ryan Orosco, Jianke Zhu, Michael C Yip
Stochastic modeling of distance to collision for robot manipulators
IEEE Robotics and Automation Letters (2020)
Nikhil Das, Michael C Yip
Steerable catheter flexible robotic system for use with endoscopes
US Patent App. 16/652,968 (2020)
Aaron Gunn, Michael Yip, Philip Weissbrod
SOLAR-GP: Sparse online locally adaptive regression using Gaussian processes for Bayesian robot model learning and control
IEEE Robotics and Automation Letters (2020)
Brian Wilcox, Michael C Yip
Scalable tactile sensor arrays on flexible substrates with high spatiotemporal resolution enabling slip and grip for closed-loop robotics
Science Advances (2020)
Hongseok Oh, Gyu-Chul Yi, Michael Yip, Shadi A Dayeh
Neural manipulation planning on constraint manifolds
IEEE Robotics and Automation Letters (2020)
Ahmed H Qureshi, Jiangeng Dong, Austin Choe, Michael C Yip

Motion planning networks: Bridging the gap between learning-based and classical motion planners
IEEE Transactions on Robotics (2020)
Ahmed Hussain Qureshi, Yinglong Miao, Anthony Simeonov, Michael C Yip
Learning-based proxy collision detection for robot motion planning applications
IEEE Transactions on Robotics (2020)
Nikhil Das, Michael Yip
Dynamically constrained motion planning networks for non-holonomic robots
Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (2020)
Jacob J Johnson, Linjun Li, Fei Liu, Ahmed H Qureshi, Michael C Yip
Composing ensembles of policies with deep reinforcement learning
Proc. International Conference on Learning Representations (ICLR) (ICLR) (2020)
Ahmed Hussain Qureshi, Jacob J Johnson, Yuzhe Qin, Byron Boots, Michael C Yip
Autonomous navigation in unknown environments using sparse kernel-based occupancy mapping
Proc. IEEE International Conference on Robotics and Automation (ICRA) (2020)
Thai Duong, Nikhil Das, Michael Yip, Nikolay Atanasov

Artemis: Mixed-reality environment for immersive surgical telementoring
Proc. Conference on Human Factors in Computing Systems (CHI) (2020)
Nadir Weibel, Danilo Gasques, Janet Johnson, Thomas Sharkey, Zhuoqun Robin Xu, Xinming Zhang, Enrique Zavala, Michael Yip, Konrad Davis

ARCSnake: An Archimedes' screw-propelled, reconfigurable serpentine robot for complex environments
Proc. IEEE International Conference on Robotics and Automation (ICRA) (2020)
Dimitri A Schreiber, Florian Richter, Andrew Bilan, Peter V Gavrilov, Hoi Man Lam, Casey H Price, Kalind C Carpenter, Michael C Yip
Active continual learning for planning and navigation
Proc. ICML Workshop on Real World Experiment Design and Active Learning (2020)
Ahmed H Qureshi, Yinglong Miao, Michael C Yip
Position/force control of a flexible manipulator under model-less control
US Patent 10,434,644 (2019)
Michael C Yip, David B Camarillo
A 2D surgical simulation framework for tool-tissue interaction
arXiv preprint arXiv:2010.13936 (2020)
Yunhai Han, Fei Liu, Michael C Yip
Robotic artificial muscles: Current progress and future perspectives
IEEE Transactions on Robotics (2019)
Jun Zhang, Jun Sheng, Ciaran O'Neill, Conor J Walsh, Robert J Wood, Jee-Hwan Ryu, Jaydev P Desai, Michael C Yip
Open-sourced reinforcement learning environments for surgical robotics
arXiv preprint arXiv:1903.02090 (2019)
Florian Richter, Ryan K Orosco, Michael C Yip

Neural path planning: Fixed time, near-optimal path generation via oracle imitation
Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (2019)
Mayur J Bency, Ahmed H Qureshi, Michael C Yip
Motion scaling solutions for improved performance in high delay surgical teleoperation
Proc. IEEE International Conference on Robotics and Automation (ICRA) (2019)
Florian Richter, Ryan K Orosco, Michael C Yip

Motion planning networks
Proc. IEEE International Conference on Robotics and Automation (ICRA) (2019)
Ahmed H Qureshi, Anthony Simeonov, Mayur J Bency, Michael C Yip
Machine Learning based Fixed-Time Optimal Path Generation
US Patent App. 16/222 (2019)
Michael Yip, Mayur Bency, Ahmed Qureshi
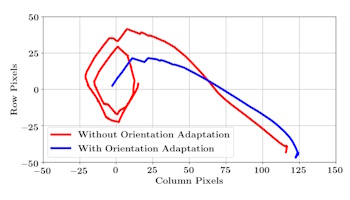
Model-free Visual Control for Continuum Robot Manipulators via Orientation Adaptation
Proc. International Symposium on Robotics Research (ISRR) (2019)
Mrinal Verghese, Florian Richter, Aaron Gunn, Phil Weissbrod, Michael Yip
Forward Kinematics Kernel for Improved Proxy Collision Checking
IEEE Robotics and Automation Letters (2019)
Nikhil Das, Michael C Yip
CRANE: A highly dexterous needle placement robot for evaluation of interventional radiology procedures
C4 Workshop at IEEE/RSJ International Conference on Robotics and Automation (2019)
Dimitri A Schreiber, Hanpeng Jiang, Guosong Li, Julie Yu, Zhaowei Yu, Renjie Zhu, Alexander M Norbash, Michael C Yip BEST PAPER AWARD
ARCSnake: An Archimedes' Screw-Propelled, Reconfigurable Robot Snake for Complex Environments
Proc. IEEE International Conference on Robotics and Automation (ICRA) (2019)
Dimitri A Schreiber, Florian Richter, Andrew Bilan, Peter V Gavrilov, Casey H Price, Kalind C Carpenter, Michael C Yip
Augmented reality predictive displays to help mitigate the effects of delayed telesurgery
Proc. IEEE International Conference on Robotics and Automation (ICRA) (2019)
Florian Richter, Yifei Zhang, Yuheng Zhi, Ryan K Orosco, Michael C Yip
An open-source 7-axis, robotic platform to enable dexterous procedures within CT scanners
Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (2019)
Dimitri A Schreiber, Daniel B Shak, Alexander M Norbash, Michael C Yip
Vision-based force feedback estimation for robot-assisted surgery using instrument-constrained biomechanical three-dimensional maps
IEEE Robotics and Automation Letters (2018)
Nazim Haouchine, Winnie Kuang, Stephane Cotin, Michael Yip
Three-dimensional hysteresis compensation enhances accuracy of robotic artificial muscles
Smart Materials and Structures (2018)
Jun Zhang, Anthony Simeonov, Michael C Yip
Deeply informed neural sampling for robot motion planning
Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (2018)
Ahmed H Qureshi, Michael C Yip

Bundled super-coiled polymer artificial muscles: Design, characterization, and modeling
IEEE Robotics and Automation Letters (2018)
Anthony Simeonov, Taylor Henderson, Zixuan Lan, Guhan Sundar, Adam Factor, Jun Zhang, Michael Yip
Adversarial imitation via variational inverse reinforcement learning
Proc. International Conference on Learning Representations (ICLR) (2018)
Ahmed H Qureshi, Byron Boots, Michael C Yip
Three-Dimensional Hysteresis Modeling of Robotic Artificial Muscles with Application to Shape Memory Alloy Actuators
Robotics: Science and Systems (2017)
Jun Zhang, Michael C Yip
Spurring innovation in spatial haptics: how open-source hardware can turn creativity loose
IEEE Robotics & Automation Magazine (2017)
Michael C Yip, Jonas Forsslund
On the control and properties of supercoiled polymer artificial muscles
IEEE Transactions on Robotics (2017)
Michael C Yip, Gunter Niemeyer
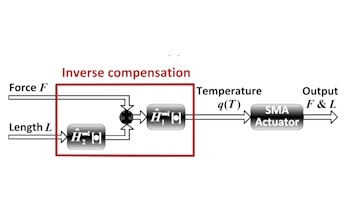
Modeling and inverse compensation of hysteresis in supercoiled polymer artificial muscles
IEEE Robotics and Automation Letters (2017)
Jun Zhang, Kaushik Iyer, Anthony Simeonov, Michael C Yip
Fastron: An Online Learning-Based Model and Active Learning Strategy for Proxy Collision Detection
Proc. Conference on Robot Learning (CoRL) (2017)
Nikhil Das, Naman Gupta, Michael Yip
Fastron: A Learning-Based Configuration Space Model for Rapid Collision Detection for Gross Motion Planning in Changing Environments
Proc. Robotics: Science and Systems Workshop on (Empirically) Data-Driven Manipulation (2017)
Nikhil Das, Naman Gupta, Michael Yip
Designing Muscle-powered Robotics with Super Coiled Polymers
Robotics: Science and Systems Workshop (2017)
Jun Zhang, Michael C Yip
Model-less control for flexible manipulators
US Patent 9,488,971 (2016)
Michael Yip, David B Camarillo
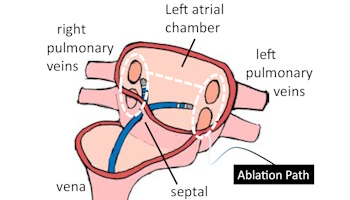
Autonomous control of continuum robot manipulators for complex cardiac ablation tasks
Journal of Medical Robotics Research (2017)
Michael C Yip, Jake A Sganga, David B Camarillo
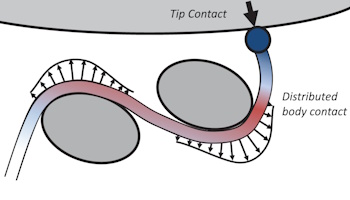
Model-less hybrid position/force control: a minimalist approach for continuum manipulators in unknown, constrained environments
IEEE Robotics and Automation Letters (2016)
Michael Yip, David Camarillo BEST PAPER AWARD

An instrumented glove for improving spasticity assessment
Proc. IEEE Healthcare Innovation Point-Of-Care Technologies Conference (HIPOCT) (2016)
Padmaja Jonnalagedda, Fei Deng, Kyle Douglas, Leanne Chukoskie, Michael Yip, Tse Nga Ng, Truong Nguyen, Andrew Skalsky, Harinath Garudadri
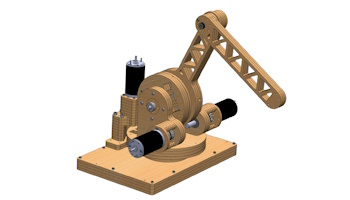
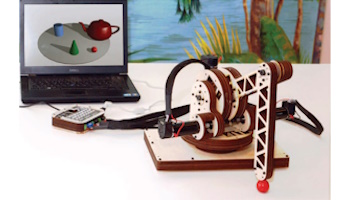
Woodenhaptics: A starting kit for crafting force-reflecting spatial haptic devices
Proc. International Conference on Tangibles, Embedded and Embodied Interactions (2015)
Jonas Forsslund, Michael Yip, Eva-Lotta Sallnäs
Six degree-of-freedom measurements of human mild traumatic brain injury
Annals of Biomedical Engineering (2015)
Fidel Hernandez, Lyndia C Wu, Michael C Yip, Kaveh Laksari, Andrew R Hoffman, Jaime R Lopez, Gerald A Grant, Svein Kleiven, David B Camarillo
High-Performance Robotic Muscles from Conductive Nylon Sewing Thread
Proc. IEEE International Conference on Robotics and Automation (ICRA) (2015)
Michael C. Yip, Gunter Niemeyer BEST PAPER AWARD NOMINEE
Model-Less Feedback Control of Continuum Manipulators in Constrained Environments
IEEE Transactions on Robotics (2014)
Michael C Yip, David B Camarillo
Model-less control of a flexible robotic catheter
Workshop on Advances in Flexible Robots for Surgical Interventions, Proc. IEEE International Conference on Robotics and Automation (ICRA) (2014)
Michael C Yip, Paul J. Wang, David B. Camarillo BEST PAPER AWARD
Linear and Rotational Measurements of Human Mild Traumatic Brain Injury
Brain Injury (2014)
Fidel Hernandez, Lyndia Wu, Michael Yip, Kevin Bui, Bradley Hammoor, Erik Ortega, Gregor Yock, Gerald Grant, Andrew Hoffman, David Camarillo
Human Tolerance to Mild Trauma in Multiple Dimensions
Journal of Neurotrauma (2014)
Fidel Hernandez, Lyndia Wu, Michael Yip, Svein Klein, Andrew Hoffman, Jaime Lopez, Kevin Bui, Brad Hammoor, Erik Ortega, Gregor Yock, Gerald Grant, David Camarillo
Ultrasound Registration
US Patent App. 13/235,373 (2012)
Septimiu Salcudean, Michael Chak Luen Yip, Troy Kiefert Adebar, Robert Nicholas Rohling
Finite element simulation of brain deformation from six degree of freedom acceleration measurements of mild traumatic brain injury
Anxiety (2014)
F Hernandez, L Wu, M Yip, A Hoffman, J Lopez, G Grant, S Kleiven, D Camarillo
Ultrasound-Based Image Guidance for Robot-Assisted Laparoscopic Radical Prostatectomy: Initial in-vivo Results
Proc. Information Processing in Computer-Assisted Interventions (IPCAI) (2013)
Omid Mohareri, Caitlin Schneider, Troy K Adebar, Mike C Yip, Peter Black, Christopher Y Nguan, Dale Bergman, Jonathan Seroger, Simon DiMaio, Septimiu E Salcudean
Prediction of Human Mild Traumatic Brain Injury in Multiple Dimensions
7th World Congress of Biomechanics (2012)
Lyndia Wu, Michael Yip, Fidel Hernandez, Joseph Schooler, Kevin Bui, Bradley Hammoor, Erik Ortega, Gregor Yock, Jaime Lopez, Andrew Hoffman, Gerald Grant, David Camarillo
Tissue tracking and registration for image-guided surgery
IEEE Transactions on Medical Imaging (2012)
Michael C Yip, David G Lowe, Septimiu E Salcudean, Robert N Rohling, Christopher Y Nguan
Registration of 3D ultrasound through an air–tissue boundary
IEEE Transactions on Medical Imaging (2012)
Troy K Adebar, Michael C Yip, Septimiu E Salcudean, Robert N Rohling, Christopher Y Nguan, S Larry Goldenberg
Real-time methods for long-term tissue feature tracking in endoscopic scenes
Proc. Information Processing in Computer-Assisted Interventions (IPCAI) (2012)
Michael C Yip, David G Lowe, Septimiu E Salcudean, Robert N Rohling, Christopher Y Nguan
Performance analysis of a haptic telemanipulation task under time delay
Advanced Robotics (2011)
Michael C Yip, Mahdi Tavakoli, Robert D Howe
Performance analysis of a manipulation task in time-delayed teleoperation
Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (2010)
Michael C Yip, Mahdi Tavakoli, Robert D Howe
Indirect low-intensity ultrasonic stimulation for tissue engineering
Journal of Tissue Engineering (2010)
Hyoungshin Park, Michael C Yip, Beata Chertok, Joseph Kost, James B Kobler, Robert Langer, Steven M Zeitels
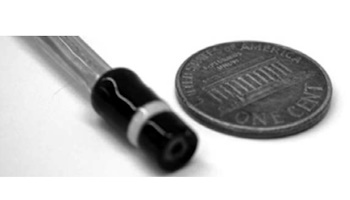
A robust uniaxial force sensor for minimally invasive surgery
IEEE Transactions on Biomedical Engineering (2010)
Michael C Yip, Shelten G Yuen, Robert D Howe
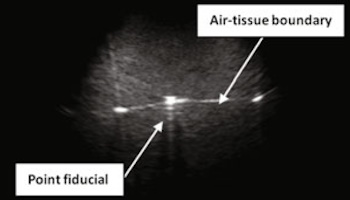
3D ultrasound to stereoscopic camera registration through an air-tissue boundary
Proc. Medical Image Computing and Computer-Assisted Intervention (MICCAI) (2010)
Michael C Yip, Troy K Adebar, Robert N Rohling, Septimiu E Salcudean, Christopher Y Nguan
Robotic force stabilization for beating heart intracardiac surgery
Proc. Medical Image Computing and Computer-Assisted Intervention (MICCAI) (2009)
Shelten G Yuen, Michael C Yip, Nikolay V Vasilyev, Douglas P Perrin, Pedro J Del Nido, Robert D Howe
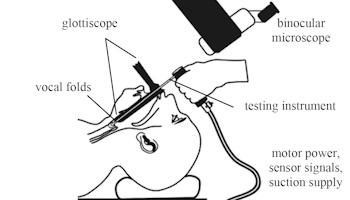
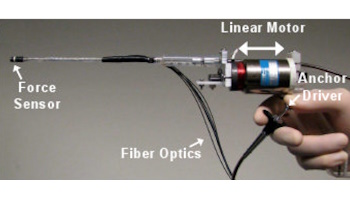
Intra-Operative Laryngoscopic Instrument for Characterizing Vocal Fold Viscoelasticity
Frontiers in Biomedical Devices (2007)
Mark P Ottensmeyer, Michael Yip, Conor J Walsh, James B Kobler, James T Heaton, Steven M Zeitels
Dynamically Extensible and Retractable Robotic Leg Linkages for Multi-task Execution in Search and Rescue Scenarios
arXiv preprint arXiv:2511.10816 (2025)
William Harris, Lucas Yager, Syler Sylvester, Elizabeth Peiros, Micheal C Yip
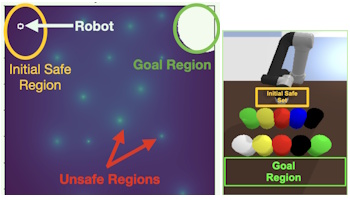
Safe Stochastic Explorer: Enabling Safe Goal Driven Exploration in Stochastic Environments and Safe Interaction with Unknown Objects
arXiv preprint arXiv:2602.00868 (2026)
Nikhil Uday Shinde, Dylan Hirsch, Michael C Yip, Sylvia Herbert
Humanoids in Hospitals: A Technical Study of Humanoid Surrogates for Dexterous Medical Interventions
arXiv preprint arXiv:2503.12725 (2025)
Soofiyan Atar, Xiao Liang, Calvin Joyce, Florian Richter, Wood Ricardo, Charles Goldberg, Preetham Suresh, Michael Yip
Registration of 3D ultrasound through an air-tissue boundary
IEEE Transactions on Medical Imaging (2012)
Troy K Adebar, Michael C Yip, Septimiu E Salcudean, Robert N Rohling, Christopher Y Nguan, S Larry Goldenberg